黑貓實驗室
...
上一頁
... 下一頁...
回首頁
...
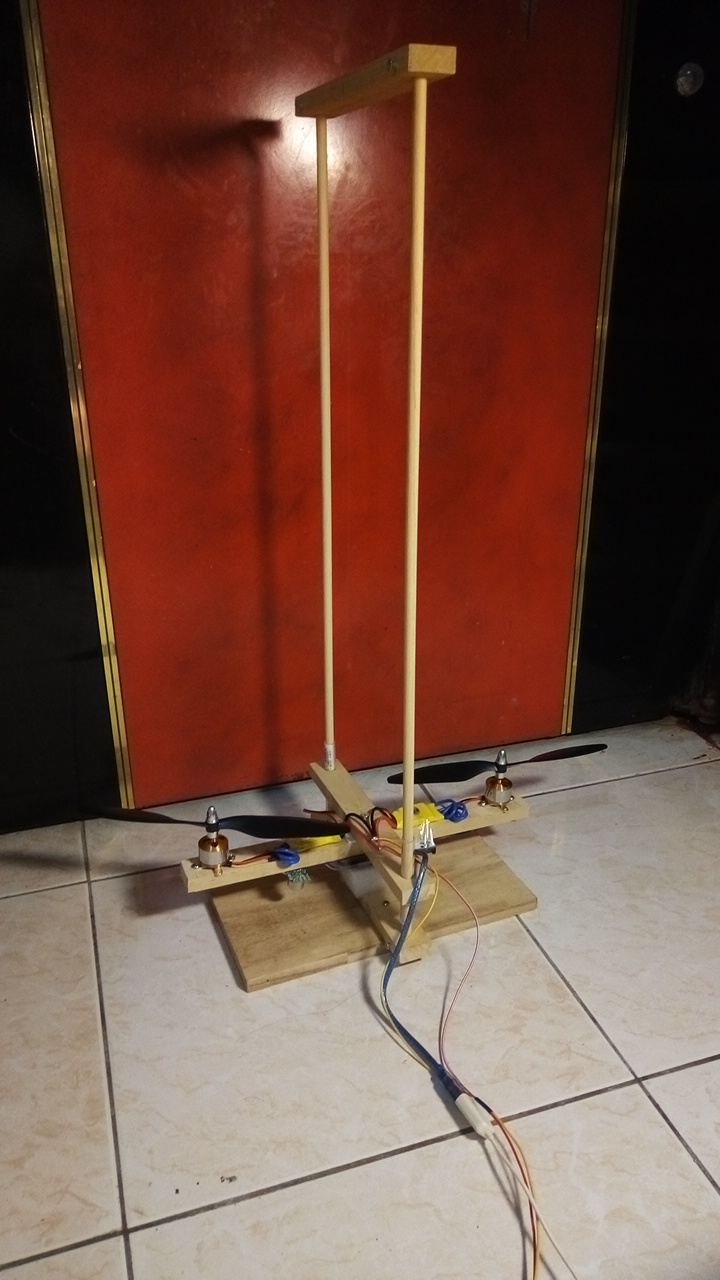
自動定高飛行
新分頁開啟圖片,可以放大圖片
使用arduino mega
uart0 連到pc
接收來自pc的指令: 啟動,停止,高度設定.
發送給PC: 目前高度, 馬達動力設定.
uart1 接到超音波測距器
接收:測距器的結果
發送:要求測距
mega計算
目前位置與目標位置的差距, 上昇/下降的速度, 上昇/下降的加速度, 自動調整馬達動力設定,
PC可以觀察超音波測距的結果.
2022.0127.4
...
上一頁
... 下一頁...
回首頁
...