黑貓實驗室
...
上一頁
... 下一頁...
回首頁
...
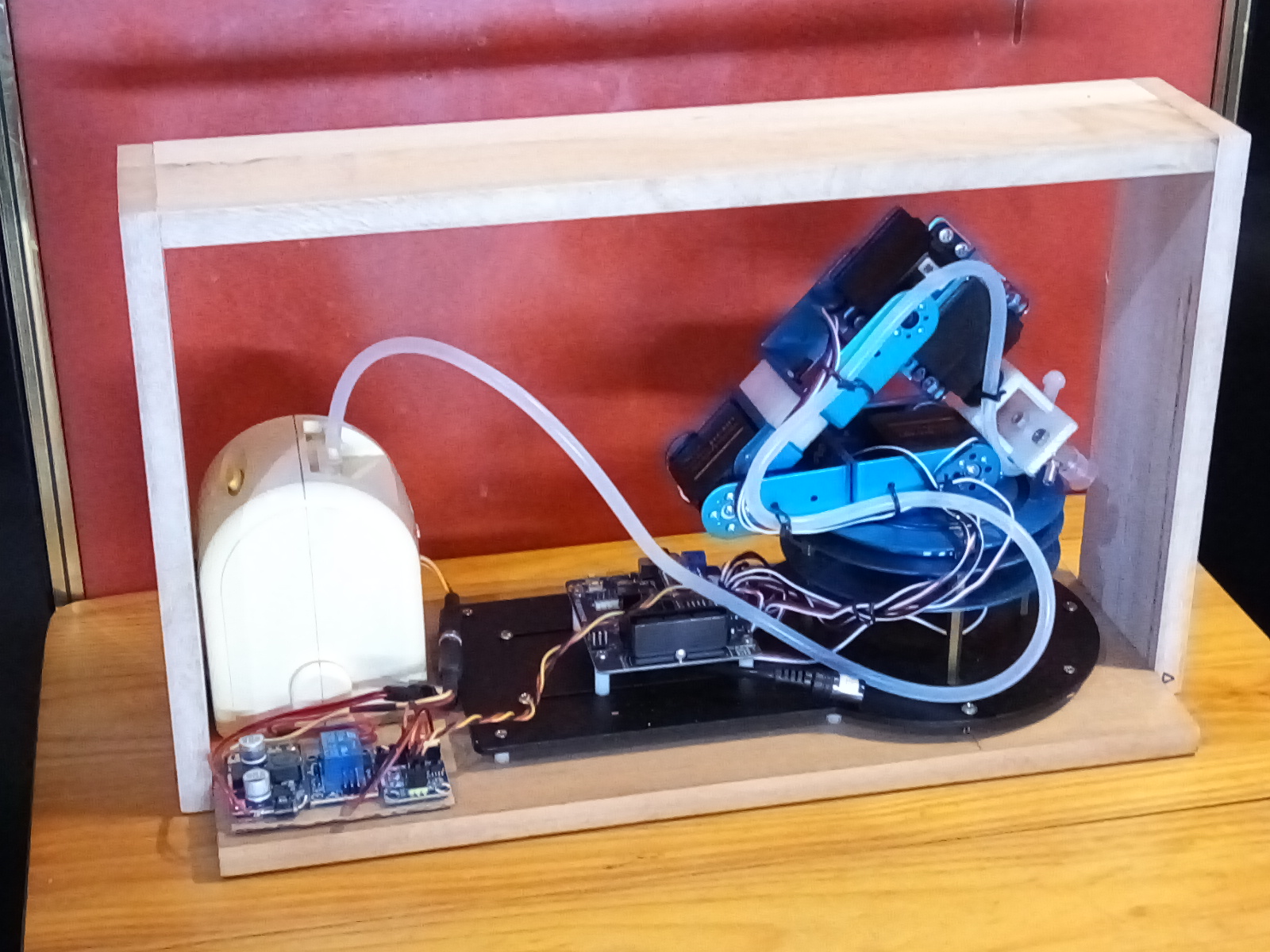
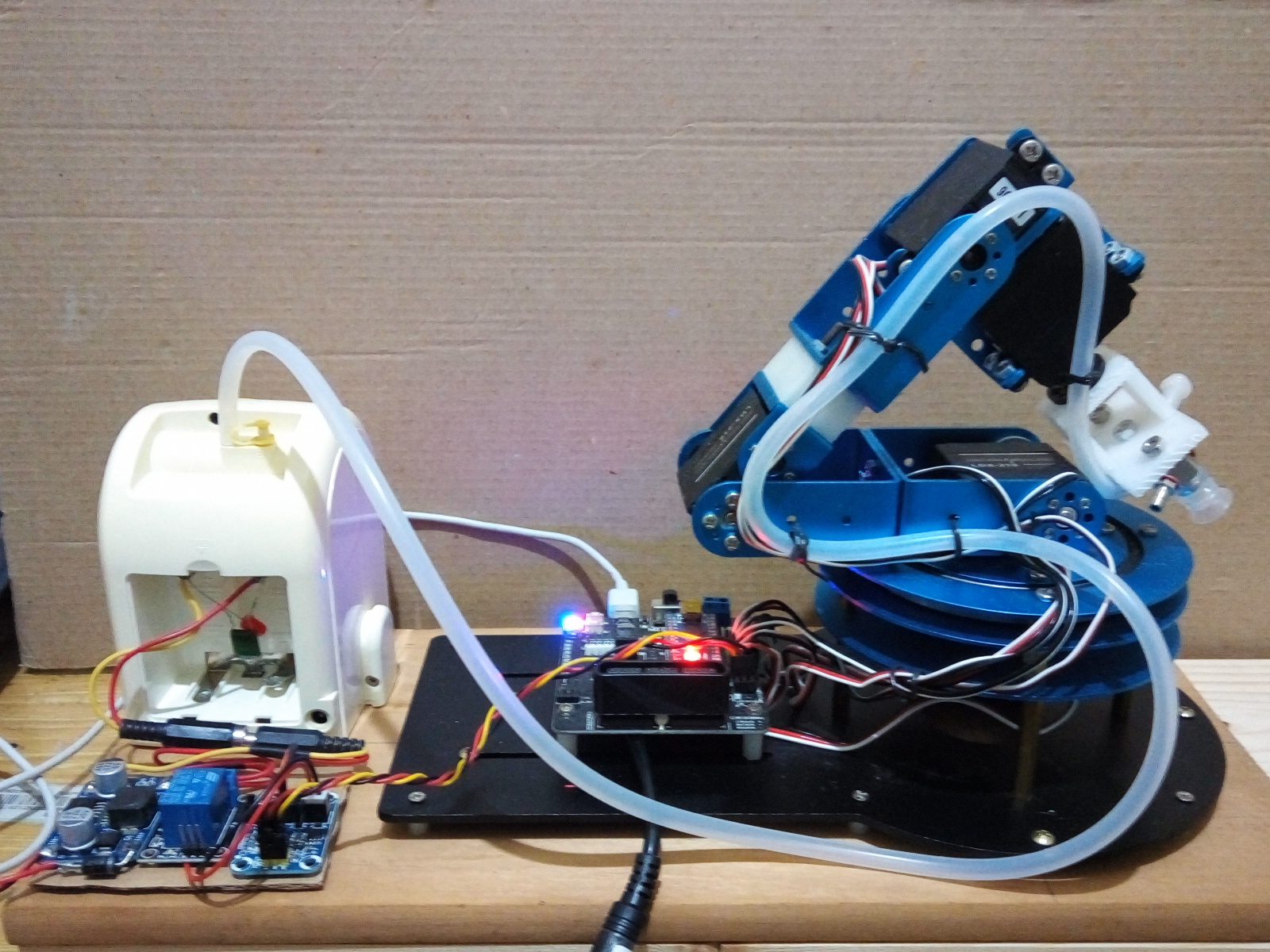
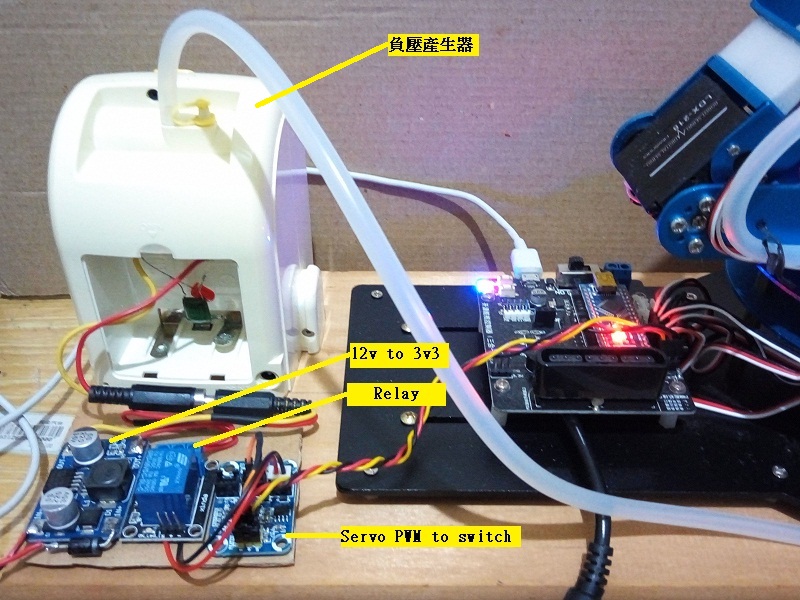
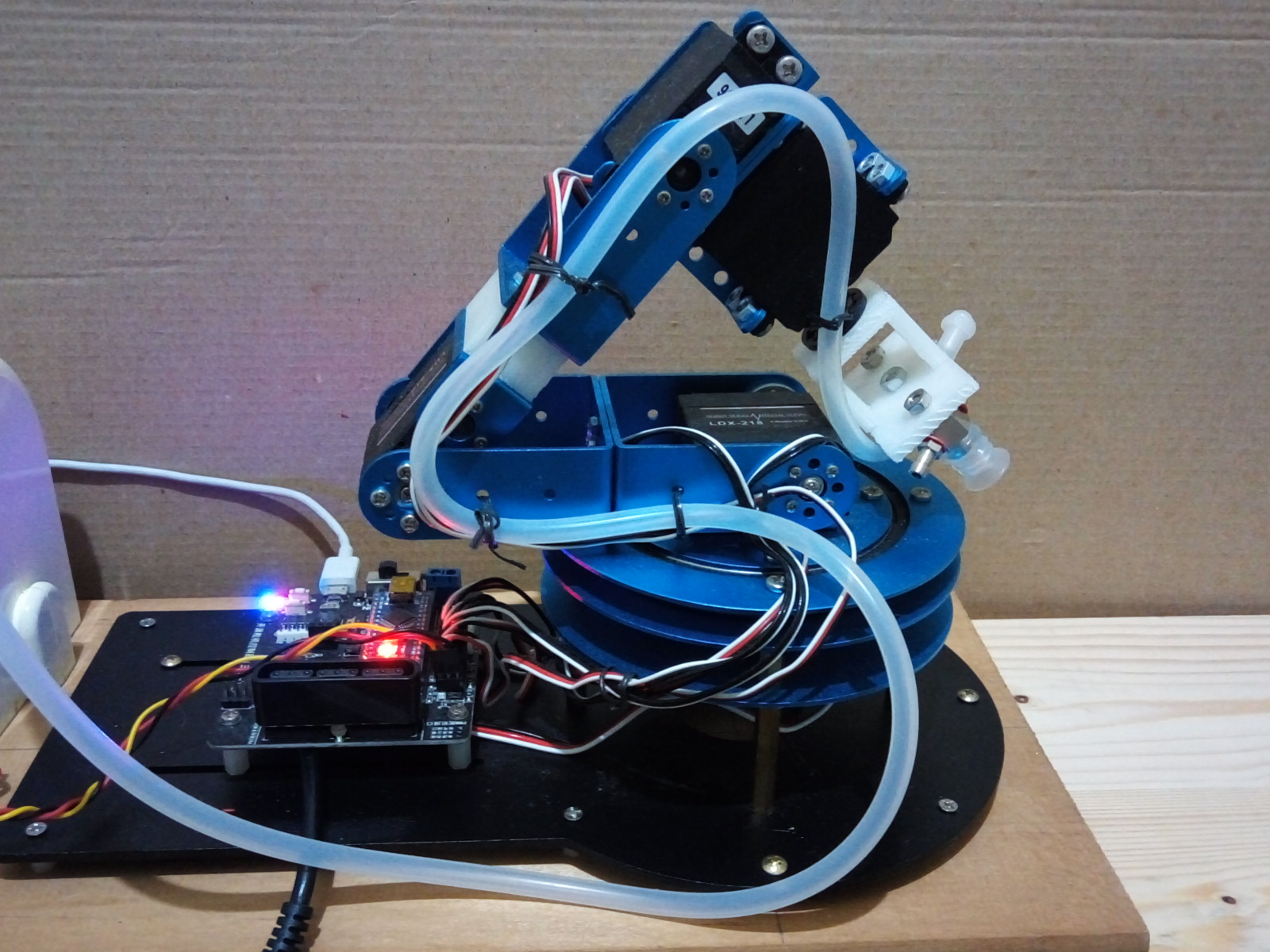
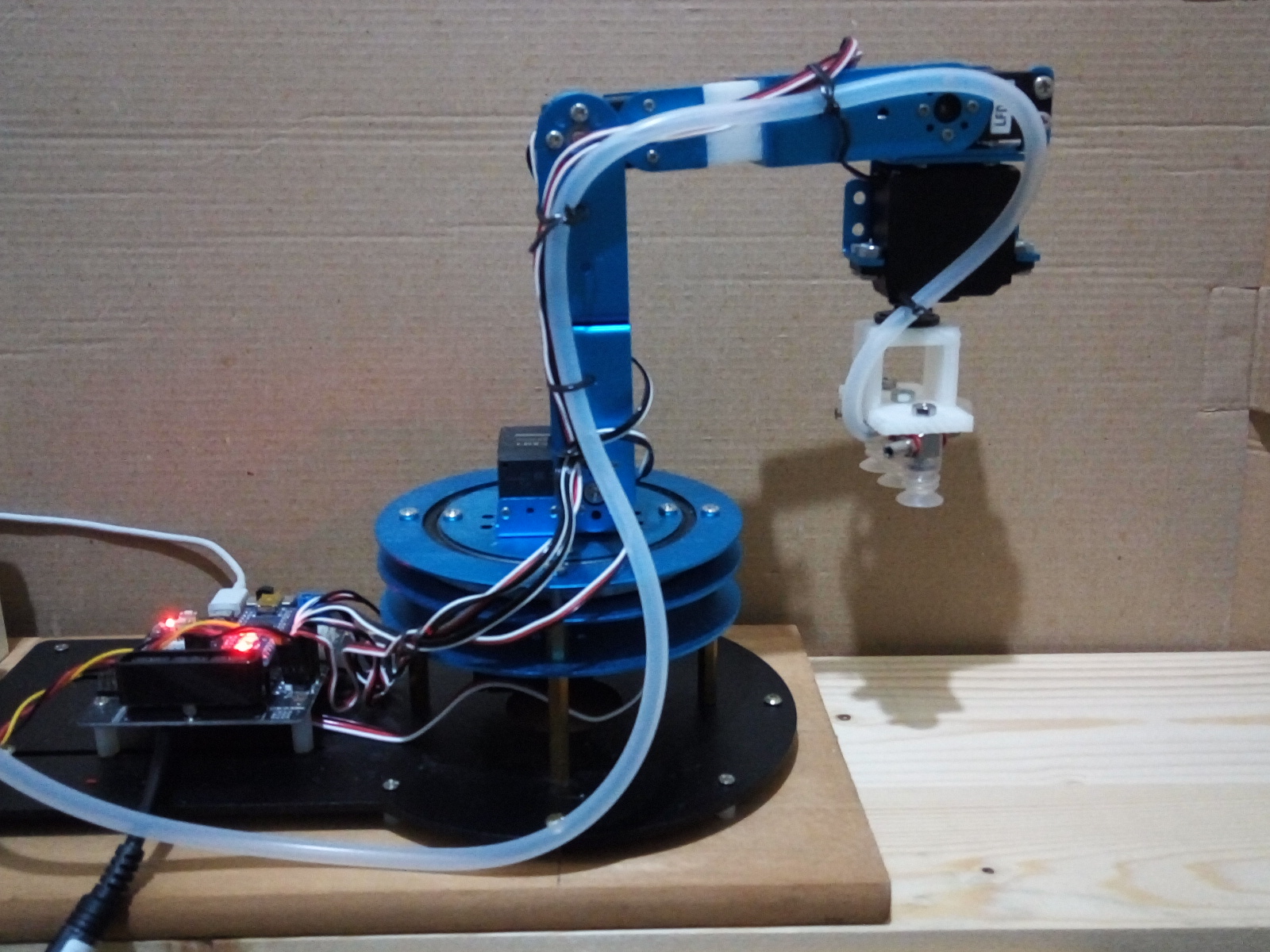
機械手臂
新分頁開啟圖片,可以放大圖片
Storage mode
sleep mode
Ready to work
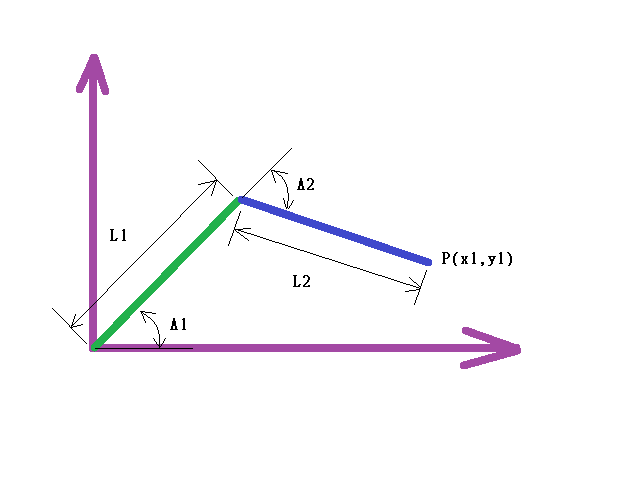
逆運動學
把抓取頭的座標, 轉成伺服機的轉動角度.這是這個項目,最麻煩的事項.臂長L1及L2, 當P為x1,y1,求算A1及A2角度.
精度不高,拿來自動對發票,還夠用.
故事多多,逆運動學,抓撲克牌有鏡面真空問題.伺服機不能設轉速,運動軌跡只能是多邊形.撞機幾次後,伺服機抖抖抖.
2022.0107.5
...
上一頁
... 下一頁...
回首頁
...